ロボット用センシング技術とは
産業用ロボットや協働型ロボットと人との接触による事故を防ぐため、数多くのセンサーや厳しい安全基準等があります。
旭光電機では自動ドア用センサーの技術を応用したロボットと人との接触を防ぐロボット用センシング開発を行っています。
製品事例
恊働ロボット用安全センサー
ロボットに接近する人を検知して、ロボットと人との接触を防ぐセンサーです。
※特許登録1件、特許申請中3件
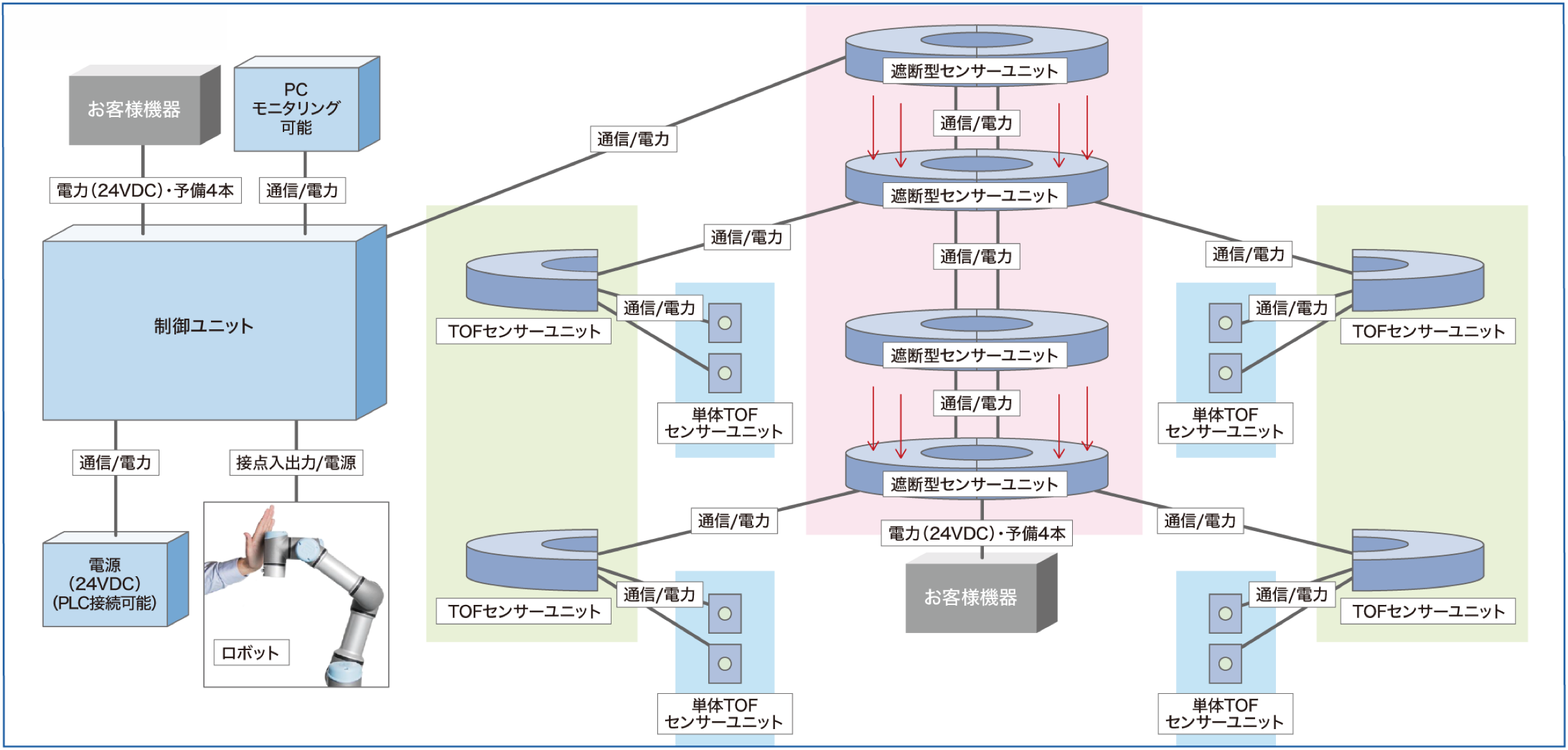
システム
特徴
非接触型の安全センサー
従来のロボット用センサーは接触型(接触を感知してロボット動作を止める)センサーがメインです。
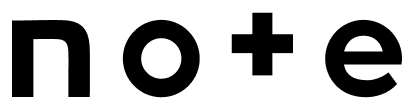
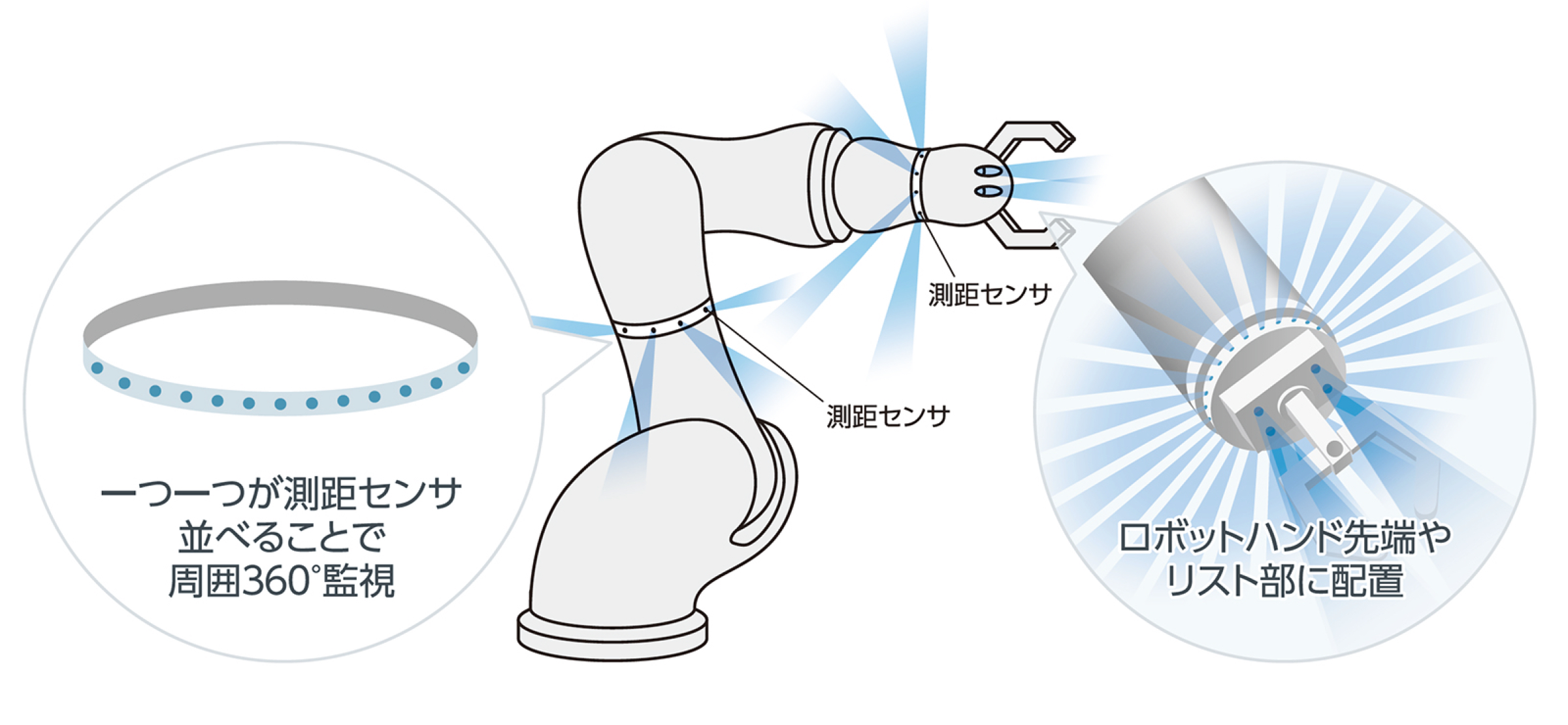
本センサーは距離を測定したり、特定の箇所に設置した赤外線投受光ユニット間の人の接近を検知することでロボットに接触する前に動作を止めることができるセンサーです。
配置が自由、死角が生じづらい
小型の測距センサーユニットを搭載しているため、死角の生じる箇所への設置が可能です。
ロボットの形状やユースケースに応じてカスタム対応可能
ロボットの形状は様々ですが、お客様ご利用のロボットの形状に合わせたカスタム対応が可能です。
仕様
製品仕様

制御ユニット
(※)microUSBによる給電のみでは供給電流が不足し、十分な性能を満足しない可能性があります
TOFセンサーユニット
半径状にTOFセンサーをアーム周囲に配置。接近距離に応じた減速・停止が可能

小型TOFセンサーユニット
小型の単体TOFセンサーにより、必要な箇所の安全性確保を実現

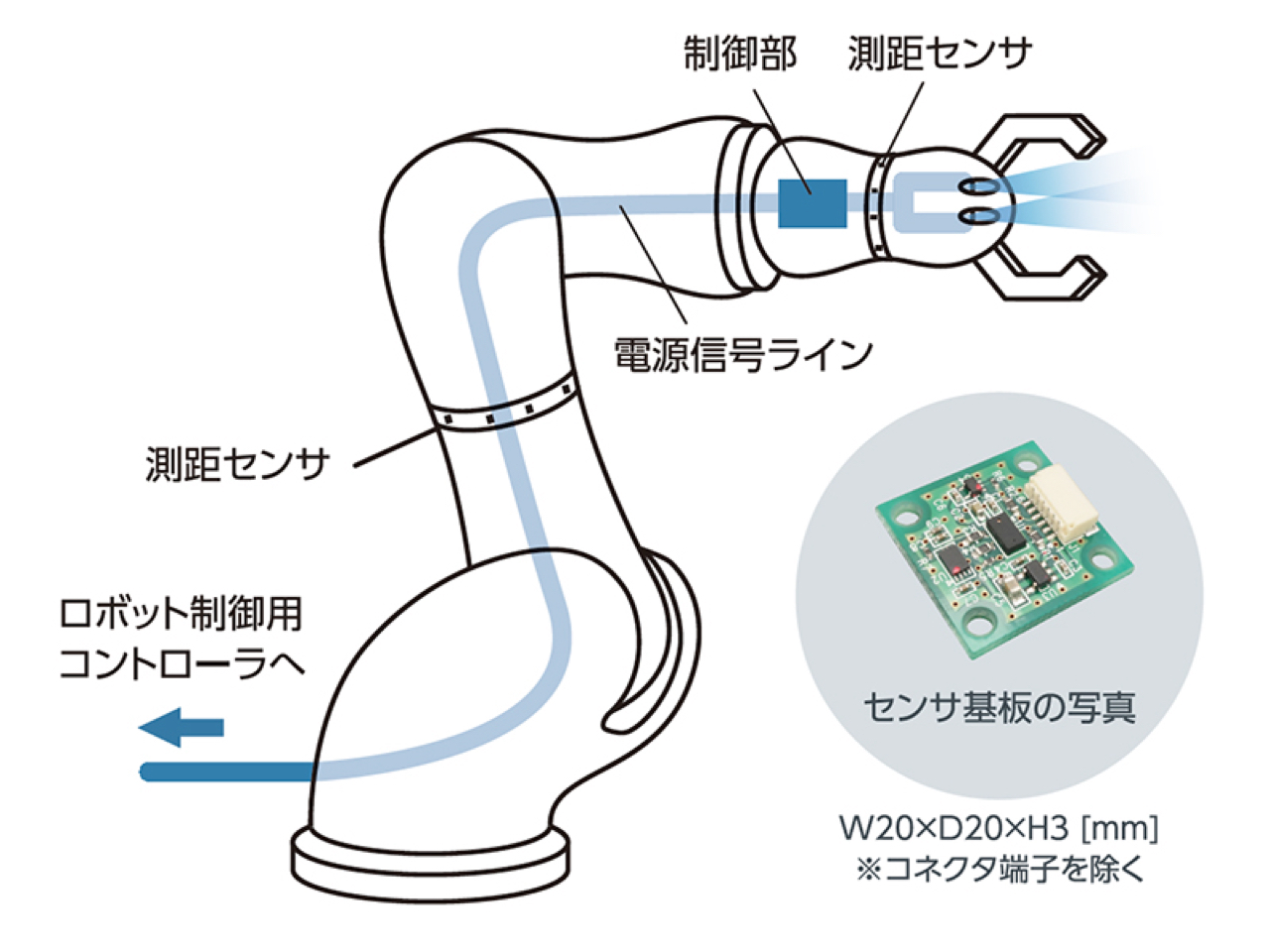
遮断型センサーユニット
多数の遮断型センサーをアーム周囲に配置。指一本でもアームに触れる前に停止が可能
全体ブロック図
マスター・スレーブロボットシステム



特徴
位置と姿勢を計測可能
一般のセンサーでは位置もしくは姿勢のみ計測しますが、FSTを利用すれば1つのセンサーで 両方同時に計測できます。
高速動作可能
最速10mSのスピードでデーター取得が可能です。
自由に構成可能
3種類の長さのFSTを自由に組み合わせること、様々な用途に適用可能です。接続ポートが6つあり、頭・腕・足の動きを同時に計測することも可能です。
手軽に利用
計測に必要な機器は本製品とPCだけで手軽に利用できます。
配線レス動作も可能
無線LANとバッテリー搭載なので、屋外など電源のない場所でも使用できます。
